
28/04/2015 ore 10:30. Il centro di controllo ha deciso che proverà una nuova comunicazione nel passaggio durante la prossima orbita.
28/04 ore 11:00. L’orbita risulta regolare anche se più alta del previsto. Si sono aperte due delle cinque antenne, si cercherà di ripristinare il controllo nelle prossime orbite.
28/04 ore 23:00. Immagini e dati dicono che sta ruotando su se stesso fuori controllo.
28/04 ore 23:30. Si cercherà di ristabilizzare l’orbita, ma è possibile un rientro incontrollato in atmosfera.
La missione dedicata alla capsula Progress M-27M lanciata da Baikonur, in Kazakistan, martedì scorso, e carica di rifornimenti destinati alla Stazione Spaziale Internazionale, è stata dichiarata ufficialmente fallita il 30 Aprile. Dopo essere stato inserito in un’orbita di parcheggio in attesa di un attracco posticipato alla ISS, il modulo si è dimostrato completamente fuori controllo costringendo i controllori di volo a interrompere le trasmissioni e rinunciare ad un ulteriore tentativo di ripristino dell’assetto.
L’ultimo incidente legato ad una capsula Progress risaliva al 2011: il cargo russo m-12m andò distrutto a causa del malfunzionamento del terzo stadio del razzo vettore Soyuz pochi minuti dopo il lancio. La commissione di stato russa è alla ricerca delle cause dell’incidente e il vice primo ministro russo Rogozin non ha nascosto la possibilità di una eventuale sostituzione del personale incaricato alla missione. Risalire alle cause di un incidente del genere comporta ovviamente un grande imbarazzo della scelta: una missione spaziale è frutto del coordinamento di tanti sottosistemi che coinvolgono non solo i vari mezzi di lancio e trasporto ma anche tutto il personale umano incaricato di seguire i processi relativi ad ogni fase pre, durante e post lancio.
Cosa intendiamo quindi quando parliamo di missione spaziale?
Sostanzialmente una missione spaziale è composta da un insieme di elementi che raggruppiamo in sottosistemi. Fra i principali:
OGGETTO DELLA MISSIONE: perché questa missione?
SEGMENTO SPAZIALE (Spacecraft, S/C): insieme di hardware e software che interagiscono con l’oggetto della missione; in particolar modo nella definizione di s/c rientrano il tipo di payload (carico pagante), il quale determina il costo e la complessità della missione (esperimenti, attrezzatura..) e lo Spacecraft bus, che supporta il payload provvedendo al mantenimento dell’orbita, alla fornitura di potenza, alla gestione dei comandi, delle telemetrie e delle informazioni, al controllo della temperatura…
SISTEMA DI LANCIO (Launch System): include il servizio di lancio, il veicolo di lancio, l’upper stage richiesto per posizionare lo S/C in orbita, l’equipaggiamento di supporto da terra.
GEOMETRIA: tutto ciò che concerne l’orbita (nel caso di satelliti) o il path (la traiettoria, nel caso di sonde come Rosetta); nel caso dei satelliti, lo spacecraft è lasciato in un’orbita di parcheggio, è portato poi in quella di trasferimento da cui raggiunge quella operativa.
COMUNICAZIONE: avviene sia in downlink e uplink, quindi le informazioni viaggiano sia dalla Terra al satellite che viceversa. Il Ground control station (stazione di controllo di terra) assolve tale compito.
SISTEMA DI TERRA (Ground System): comprende le stazioni di terra fisse e mobili attorno al globo che consentono di comandare ed eseguire il tracking (il rintracciamento via radio) dello s/c , ricevere e processare telemetrie e dati di missione e distribuire informazioni.
OPERAZIONI DI MISSIONE (Mission Operations): è l’insieme delle persone coinvolte nel ground e space segment, che assistono le procedure e i flussi di dati.
Come è abbastanza logico credere dunque, l’attività legata ad una missione non inizia solo al momento del lancio: la progettazione e l’assemblaggio stessi di uno spacecraft richiedono un certo tempo, addirittura 4 o 5 anni, periodo in cui componenti e sottosistemi sono immagazzinati ad opportune condizioni ambientali, al fine di non provocarne la degradazione. L’ambiente pre-lancio è infatti l’unico relativo alla missione su cui si abbia una certa possibilità di controllo delle condizioni ambientali, al contrario delle fasi successive, quella di lancio e quella di attività in orbita, in cui il nostro potere si limita alla difesa dall’ostilità proveniente dai fattori esterni. Alla fase del lancio sono legati ad esempio rumori estremamente forti e potenti shock termici da cui si generano altrettanto forti vibrazioni che provano notevolmente la struttura esterna del veicolo. Tali condizioni differiscono molto sia da quelle testate in laboratorio che da quelle che lo s/c incontrerà poi nello spazio, in cui la progressiva rarefazione (fino alla scomparsa) dell’atmosfera porta ad una rapida diminuzione di pressione esterna. Le vibrazioni ed i rumori sono dovuti essenzialmente al funzionamento dei motori principali ed all’attrito generato dal movimento dello S/C nelle zone più basse dell’atmosfera, in cui la densità di aria è maggiore; per via di questo “sfregamento” in aria della superficie dello s/c si genera anche un campo di temperature molto elevate.
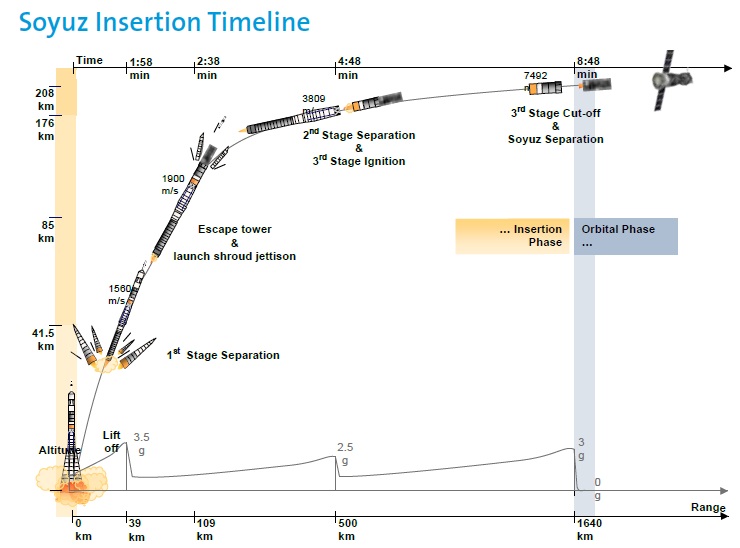
La fase del lancio risulta dunque estremamente caotica, in particolar modo in due momenti cruciali: il LIFT-OFF (decollo), in cui la produzione di scarichi da parte dei motori verso terra è massima e dunque, per la legge di azione-reazione di Newton, lo è anche la sollecitazione di risposta verso la struttura del razzo; tale effetto si smorza naturalmente all’aumentare dell’altitudine, ma durante l’ascesa si verifica un secondo picco di caos, in cui il veicolo viaggia in TRANSONICO, una fase in cui cioè in punti diversi della superficie dello S/C si hanno velocità di volo diverse, alcune sotto l’unità (Mach<1), altre sopra il sonico. Tale situazione genera degli urti sulla superficie, da cui si genera un disturbo del flusso che diventa instabile. In breve, il numero di Mach (M) è dato dal rapporto tra la velocità di volo relativa V e la velocità del suono C, la quale è proporzionale alla radice della temperatura del fluido in cui è immerso il velivolo (nel nostro caso l’aria). Per valori del numero di Mach inferiori all’unità (M<1) dunque il generico velivolo viaggia in regime subsonico e il flusso attorno alla sua superficie ad opportuni valori di incidenze non genera disturbi. Per M=1 si passa al regime sonico, in cui cioè il velivolo ha una velocità pari a quella che ha il suono nel mezzo in cui sta viaggiando: per intenderci, il rumore provocato dal suo passaggio e l’arrivo fisico del velivolo sono contemporanei! Per M>1 il regime è supersonico; in tali condizioni la compressione del flusso sulla superficie del velivolo è tale da provocare la nascita di urti che creano disturbo. Superare il valore unitario del Mach significa rompere il muro del suono; quest’ultimo è un intenso fronte di pressione che, quando è attraversato, provoca delle fortissime vibrazioni alla struttura dell’aereo. Il caso di volo transonico corrisponde ad una situazione in cui le velocità relative di volo nei punti della superficie lungo l’asse longitudinale del velivolo hanno valori compresi nel range 0.8<M<1.2, a metà quindi fra l’alto subsonico e il basso supersonico.

La foto, risalente al Luglio 1999, ritrae un F/A-18 Hornet nell’istante in cui rompe la barriera del suono; il cono bianco è un effetto molto raro da osservare: esso infatti si rende visibile solo per delle condizioni di umidità e temperatura tali per cui si abbia la condensazione del vapore acqueo disciolto in atmosfera.

Il lift-off dell’Apollo 11 nella storica missione verso la Luna
Una volta comunque superata la fase del lancio, in cui gli “stadi” del lanciatore, esaurita la propria percentuale di carburante, si separano dallo stesso, finalmente lo spacecraft arriva nello spazio.
 Per convenzione, lo spazio inizia all’altitudine per cui un oggetto messo in orbita è in grado di rimanere in orbita per un breve periodo, prima che l’attrito generato dalle particelle (se pur in bassissima concentrazione) di atmosfera lo rallenti eccessivamente fino a farlo precipitare verso la Terra. Dovendo stabilire una quota indicativa, si fa riferimento ad un’altezza di circa 130 km sul livello del mare. Per quanto riguarda le orbite terrestri, se ne contano due tipi: quelle LEO (Low Earth Orbit) e quelle GEO (Geostationary Earth Orbit); le prime, tra le quali rientra ad esempio l’orbita della ISS, come dice il nome stesso sono orbite “basse”, comprese fra i 200 e i 2000 km di altitudine, il cui limite inferiore è imposto da un grado di rarefazione di atmosfera accettabile; il periodo di rivoluzione di queste orbite è in media di 90 o 100 minuti. Per evitare eccessivi ritardi nelle trasmissioni dovuti alle grandi distanze, le orbite LEO sono preferite alle GEO per quanto riguarda le comunicazioni.
Per convenzione, lo spazio inizia all’altitudine per cui un oggetto messo in orbita è in grado di rimanere in orbita per un breve periodo, prima che l’attrito generato dalle particelle (se pur in bassissima concentrazione) di atmosfera lo rallenti eccessivamente fino a farlo precipitare verso la Terra. Dovendo stabilire una quota indicativa, si fa riferimento ad un’altezza di circa 130 km sul livello del mare. Per quanto riguarda le orbite terrestri, se ne contano due tipi: quelle LEO (Low Earth Orbit) e quelle GEO (Geostationary Earth Orbit); le prime, tra le quali rientra ad esempio l’orbita della ISS, come dice il nome stesso sono orbite “basse”, comprese fra i 200 e i 2000 km di altitudine, il cui limite inferiore è imposto da un grado di rarefazione di atmosfera accettabile; il periodo di rivoluzione di queste orbite è in media di 90 o 100 minuti. Per evitare eccessivi ritardi nelle trasmissioni dovuti alle grandi distanze, le orbite LEO sono preferite alle GEO per quanto riguarda le comunicazioni.
 Le GEO sono invece orbite che vengono completate a una quota di 36000 km sul livello del mare. Orbitare a tale altitudine consente infatti allo spacecraft di coprire sempre lo stesso punto del pianeta; il periodo di rivoluzione per tali satelliti sarà dunque di ben 24 ore! Per definire un’orbita tuttavia non è sufficiente parlare di quote: alcuni altri parametri sono fondamentali in quanto possono influenzare il dimensionamento dei pannelli solari; fra questi, l’inclinazione del piano orbitale, l’angolo formato dal piano orbitale con la congiungente Terra-Sole. Rimanendo su uno studio più generale invece sicuramente son da definire la forma dell’orbita (più o meno eccentrica), il periastro e l’apoastro.
Le GEO sono invece orbite che vengono completate a una quota di 36000 km sul livello del mare. Orbitare a tale altitudine consente infatti allo spacecraft di coprire sempre lo stesso punto del pianeta; il periodo di rivoluzione per tali satelliti sarà dunque di ben 24 ore! Per definire un’orbita tuttavia non è sufficiente parlare di quote: alcuni altri parametri sono fondamentali in quanto possono influenzare il dimensionamento dei pannelli solari; fra questi, l’inclinazione del piano orbitale, l’angolo formato dal piano orbitale con la congiungente Terra-Sole. Rimanendo su uno studio più generale invece sicuramente son da definire la forma dell’orbita (più o meno eccentrica), il periastro e l’apoastro.
Mi è stato chiesto una volta come fosse possibile trasportare a bordo di una navicella spaziale tanto carburante da consentirle di rimanere in orbita intorno alla Terra per tanto tempo; ebbene, non vi è alcun bisogno di carburante! Così come accade per la Terra con il Sole infatti, anche i satelliti messi in orbita obbediscono alle leggi di Keplero: i satelliti descrivono dunque orbite ellittiche attorno al pianeta, percorrendo le medesime aree comprese in archi di ellisse nel medesimo tempo e mantenendo costante il rapporto fra il cubo del semiasse maggiore della propria orbita ed il quadrato del periodo di rivoluzione. D’altro canto, è vero che può essere necessario utilizzare periodicamente dei motori secondari appositi per ristabilire l’orbita ad una quota opportuna, come nel caso della ISS che ad una quota di circa 400 km risente ancora dell’attrito dell’atmosfera terrestre.
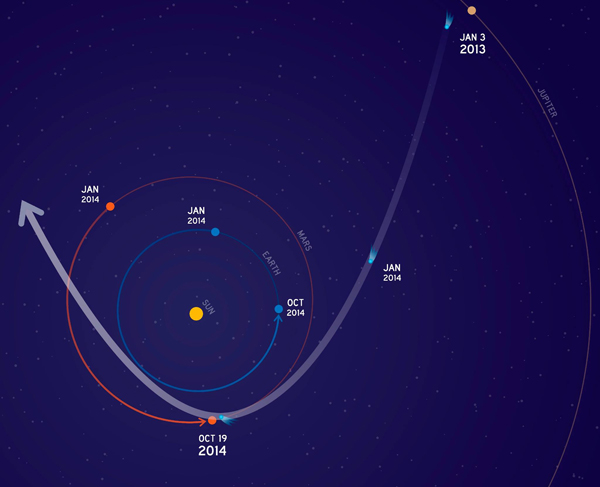
Un esempio di flyby. Trattandosi in questo caso di una cometa in fase di passaggio spontaneo vicino ad un pianeta, la “manovra” è imposta dalle leggi fisiche; la medesima cosa vale per i satelliti in transito vicino ad un pianeta se però imponiamo a monte il fatto che ovviamente la traiettoria di un satellite debba essere studiata a tavolino prima del lancio e che dunque il suo passaggio vicino ad un pianeta che si trova in un determinato punto della sua rivoluzione intorno al Sole sia tutt’altro che casuale.
Sebbene dunque mantenere l’orbita attorno ad un pianeta a determinate condizioni sia scritto nelle leggi della fisica, mantenere il controllo di uno s/c è qualcosa di meno naturale. Non solo infatti a volte la necessità è quella di raggiungere un pianeta ben più lontano della Terra, effettuando manovre studiate come i flyby che sfruttano la gravità di un pianeta per generare il cosiddetto “effetto fionda” e spararlo verso la traiettoria di interesse, ma ben più complicato è il controllo di attitude (assetto), ossia la rotazione del satellite attorno al suo centro di massa. Si è ipotizzato che proprio la perdita del controllo d’assetto, dovuta probabilmente ad uno sgancio troppo violento dagli altri stadi, possa aver portato alla failure (fallimento) della missione Progress.
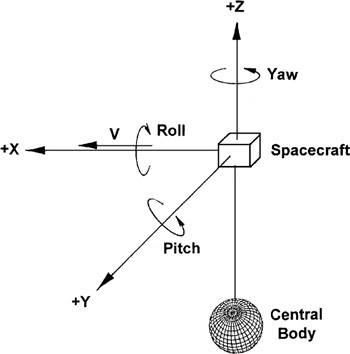
Gradi di libertà del corpo dello S/C relativi all’assetto; così come accade in aeronautica, la rotazione intorno all’asse x prende il nome di rollìo, quella intorno all’asse y di beccheggio infine quella intorno all’asse z di imbardata.
Per il controllo dell’assetto di uno S/C son installati a bordo due sistemi appositi, ADCS (Attitude Determination and Control System) e GN&C (Guidance, Navigation & Control), che prevedono l’utilizzo di due tipi di metodi, attivi e passivi; rispettivamente, gli uni generano delle coppie di controllo in base ai dati rilevati, mentre gli altri sfruttano gli aspetti negativi a proprio vantaggio.
Tra i metodi attivi ad esempio rientrano le reaction wheels (ruote di reazione), il cui principio di funzionamento è la conservazione del momento angolare del satellite; in pratica, si mette in rotazione una massa all’interno del satellite e questo, per reazione, prenderà a ruotare nel verso opposto. Per avere il controllo completo sul satellite ovviamente si avrà una ruota per ogni asse.
La stabilizzazione magnetica invece è uno dei metodi passivi più semplici: si applicano al satellite dei magneti permanenti orientati in modo tale da allineare uno degli assi body dello s/c alle linee di campo magnetico terrestre.
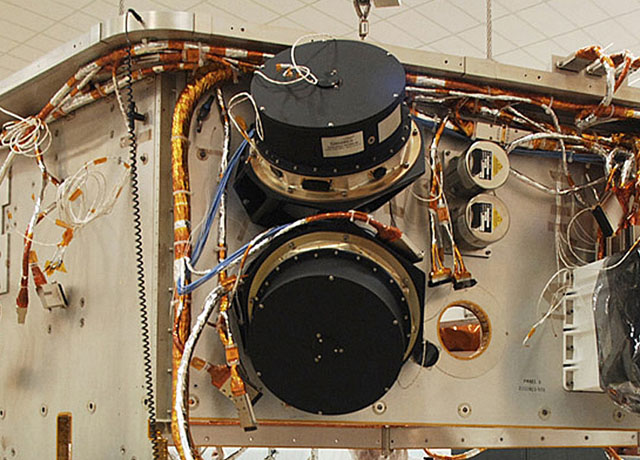
Reaction wheel del satellite Kepler
Solitamente nella fase EOL (End Of Life, o fine vita) del satellite si usa abbandonarne intenzionalmente il controllo dell’altitudine e dell’assetto provocandone la caduta verso la Terra lungo una traiettoria prevista in un certo corridoio di rientro. Rientrando in atmosfera poi, il satellite brucia per via dell’attrito, seminando solo dei piccoli detriti che nella maggior parte dei casi raggiungono il mare. La stessa sorte toccherà a Progress, di cui si è ufficialmente perso il controllo Mercoledì scorso e che si prevede raggiungerà la Terra tra il 7 e l’ 11 di Maggio. Per lei tuttavia nessuna certezza sulla traiettoria di rientro e nessuna garanzia sulla completa combustione in atmosfera: due tonnellate tra rifornimenti alimentari e strumenti di supporto agli esperimenti scientifici inizialmente diretti verso la Stazione Spaziale fluttuano liberi sulle nostre teste e, si sa, la scienza è dura a morire.
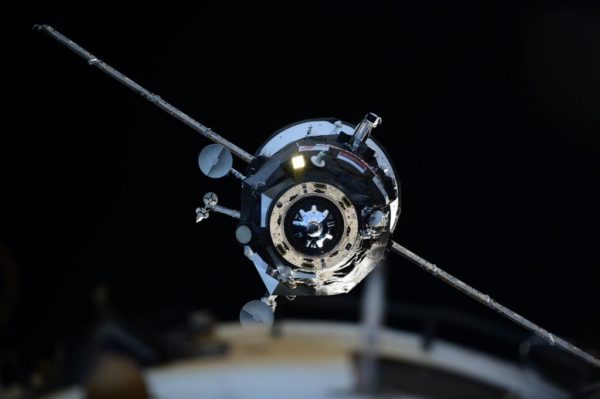
The Progress M-26M spacecraft on final approach to the International Space Station.
Attenzione dunque, pare che nei prossimi giorni le Aquaridi non saranno le uniche meteore visibili in cielo!